|
 |
 |
|
实验室现有专职人员78人,兼职3人。引进博士主要来自于国内重点大学,职称与学历结构合理。主要研究方向如下:
研究方向之一:机械系统动力学
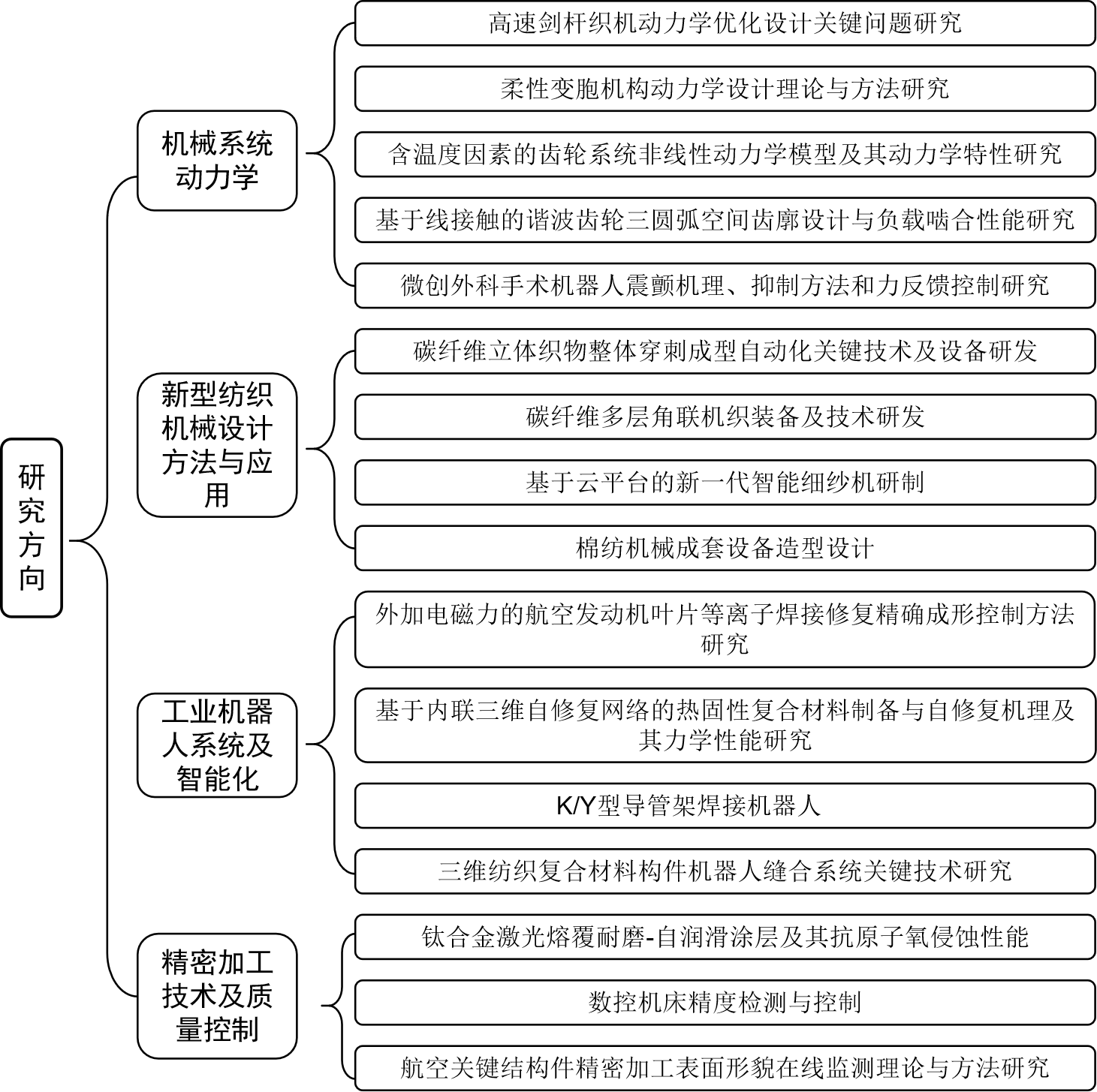
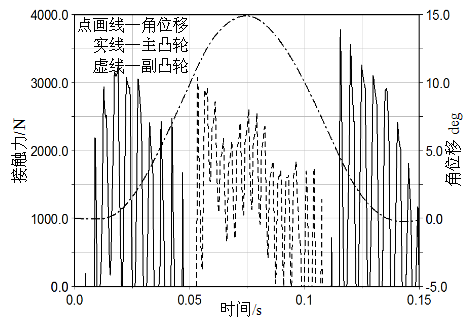
高速剑杆织机具有转速高、精度高、载荷低(二高一低)的特点,其动力学问题主要存在于开口机构、打纬机构和引纬机构(以下简称三大机构)中。机构高速运转时,系统中构件的惯性力剧增,引发的构件变形会导致工作端运动规律偏离预定的要求,产生不容忽视的动态运动偏差,甚至会激起强烈的振动、噪声。因此,高速剑杆织机整体动态性能的优劣严重制约着其转速的提高,同时也是制约我国剑杆织机整体性能和效率提升的瓶颈。
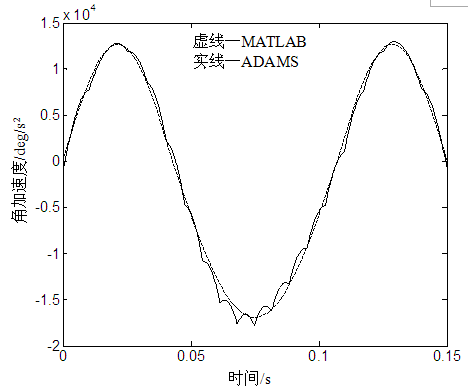
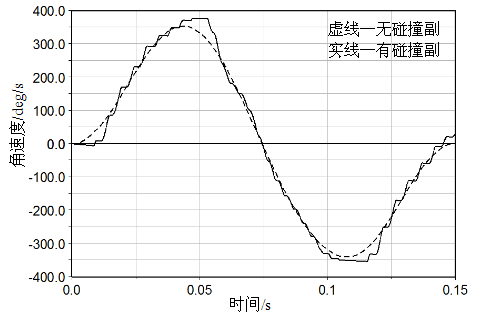
筘座角加速度对比图 筘座角速度对比图
筘座角加速度对比图 主副凸轮接触力
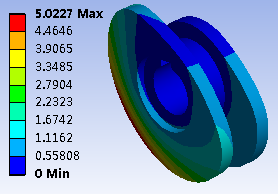
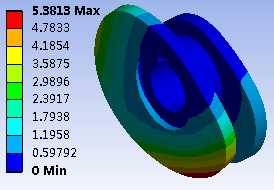
(a) 1阶模态图 (b) 2阶模态图
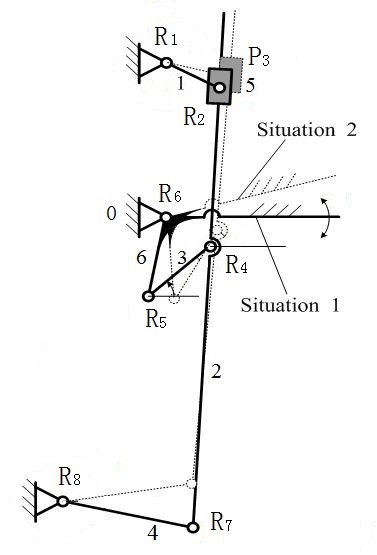
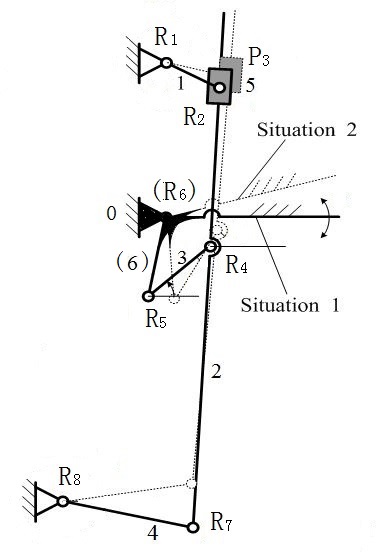
(c) 3阶模态图 (d) 4阶模态图 共轭凸轮各阶模态图 2.柔性变胞机构动力学设计理论与方法研究 柔性变胞机构在运动过程中,柔性构件对机构运动、动力学特性的影响是很大的,特别是在构态切换时,各构件的柔性变形以及由此引起的冲击运动必须予以考虑,否则,将直接影响系统的安全性和可靠性。因此,如何设计出满足一定工作性能及使用要求的柔性变胞机构具有重要意义。而对柔性变胞机构进行动力学设计理论与方法的研究是机构学及机械设计领域最为基础性的研究工作,它必将为机构及机械的创新和优化设计拓展新的途径。
微型缝纫机实物样机
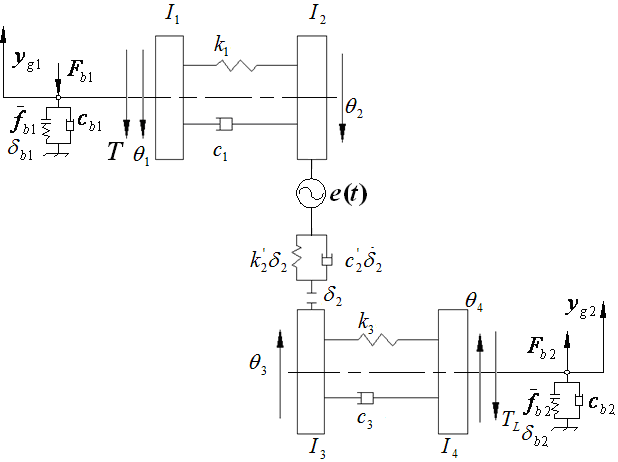
针脚密度调节机构(构态1) 送料机构(构态2) 3.含温度因素的齿轮系统非线性动力学模型及其动力学特性研究 基于Blok闪温理论,推导出齿面接触温度随时间变化的表达式,计算主、从动齿轮的齿面闪温,计算由齿面接触温度变化导致的齿廓变形;根据Hertz接触理论,推导出啮合刚度随齿面接触温度变化的表达式。构建温度刚度,将温度的影响引入齿轮系统动力学模型。综合考虑齿轮啮合时的齿侧间隙、时变刚度、综合传递误差和齿面摩擦等因素,由简单到复杂,对单自由度齿轮扭转振动系统、齿轮-转子系统、考虑支承的三自由度齿轮系统、齿轮-转子-轴承和二级齿轮传动等五种系统,分别建立不考虑温度因素和考虑温度因素两种情况下的非线性动力学模型,研究系统动态特性。
齿轮-转子-轴承简化物理模型 二级直齿轮系统的离散物理模型
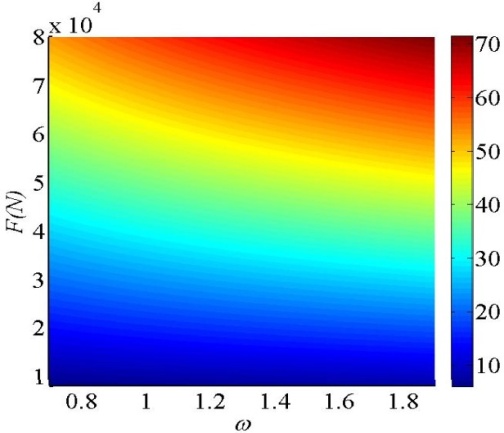
(a)第一对齿轮副 (b) 第二对齿轮副 二级齿轮系统载荷-频率耦合变化时的齿面最大闪温 4.基于线接触的谐波齿轮三圆弧空间齿廓设计与负载啮合性能研究 提出一种基于包络理论的谐波齿轮三圆弧空间齿廓设计、拟合和评价验证方法。通过分析圆弧齿廓参数对包络存在区间和共轭齿廓形状的影响,获得尽可能大的包络存在区间,增加参与共轭啮合齿数,实现在整个啮合区间上轮齿连续共轭传动。同时,通过建立能更准确反映柔轮空间变形的共轭齿廓的计算模型,使得沿轴向不同截面的齿廓实现线接触共轭啮合,从而增加啮合接触面,提高谐波齿轮的承载能力,延长疲劳寿命。
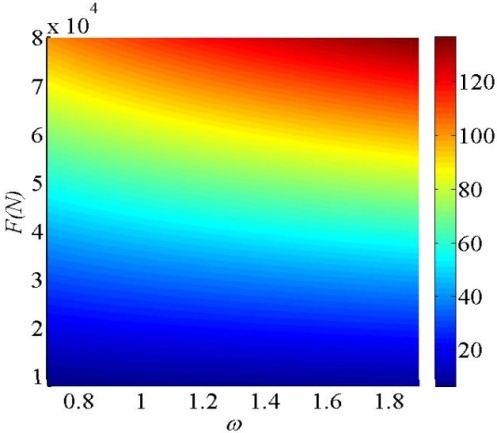
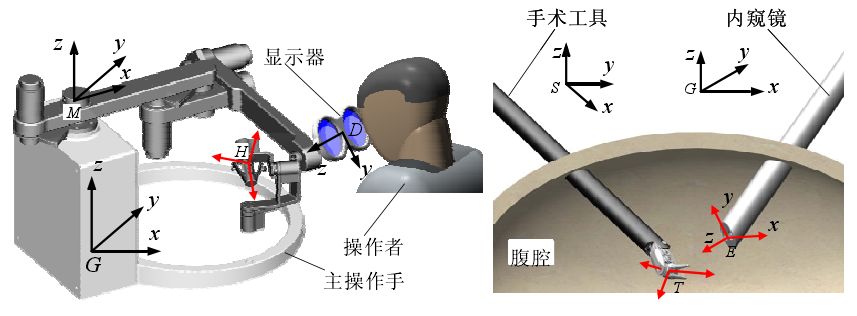
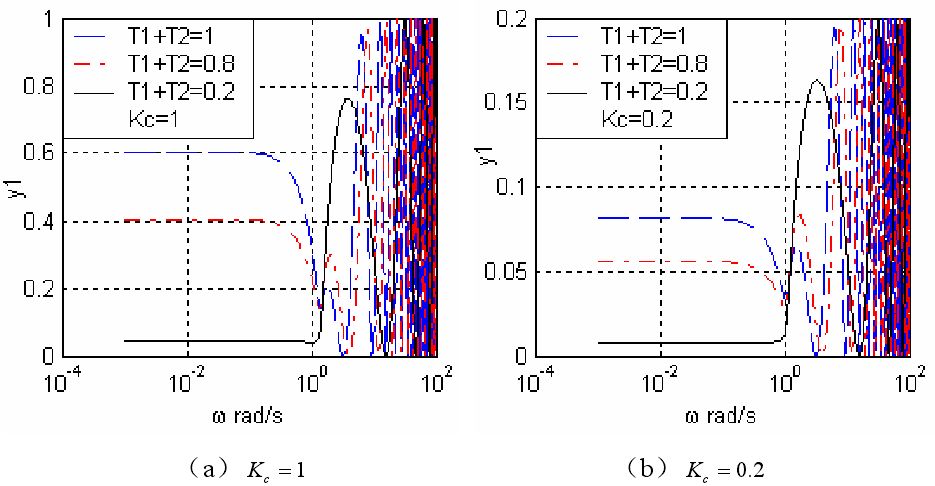
接触区与非接触区的内力计算简图 5.微创外科手术机器人震颤机理、抑制方法和力反馈控制研究 主要研究内容包括丝传动多自由度手术器械设计和动力学建模、震颤产生机理和抑制方法、主从运动和力反馈控制结构和控制策略、实验系统构建和实验研究。通过研究,有望在微创外科手术机器人主从运动和力反馈控制理论方面取得突破,实现无力传感器的主从位置-力控制,为无法集成力/力矩传感器主从式医疗机器人系统实现运动和力反馈控制提供系统方法和理论依据。
微创外科手术机器人系统示意图
不同KC下的角速度变化曲线 研究方向之二:新型纺织机械设计方法与应用
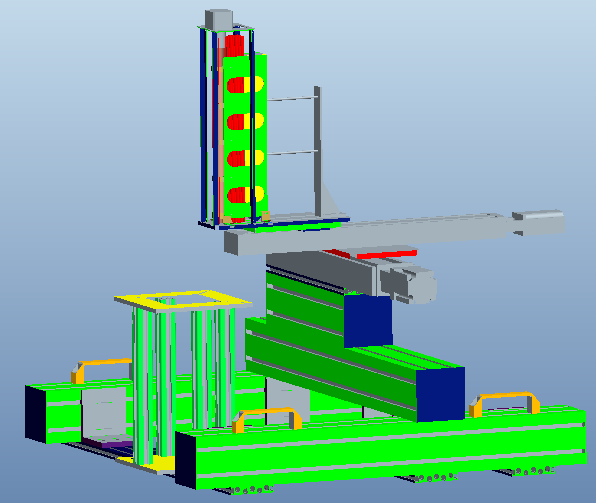
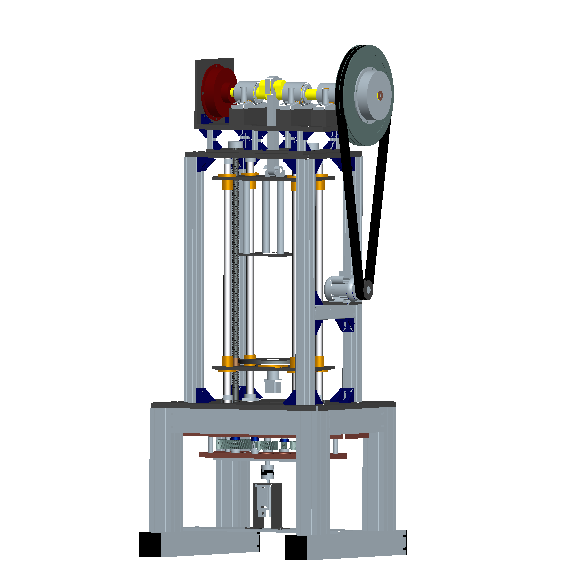
1.碳纤维立体织物整体穿刺成型自动化关键技术及设备研发 碳纤维立体织物整体穿刺成型工艺中,Z向钢针作为立体织物的一个纤维方向,钢针阵列对于立体织物的穿刺及成型非常重要,其关键技术是钢针阵列规整性控制。带有等距密排精密微小孔的穿刺模板是实现钢针阵列规整性的重要工装,穿刺钢针逐一布放入穿刺模板的大量微小孔中最终形成整体穿刺钢针阵列。然而,用于整体穿刺的钢针阵列排列密度较高,一般大于10根/cm2,使用数量也十分巨大,少则几千根多则数万根。随着立体织物技术进步,多种平面形状的整体穿刺成型织物不断被开发出来,除矩形、环形外还有马蹄形等多种平面异形立体织物。以往手工布放钢针阵列工作强度大,复杂平面图形布放难度大、出错率高。针对穿刺钢针阵列手工布放的不足,适用于超长穿刺钢针(长度大于360mm)竖直方向连续自动布放机构需要创新设计。
整体穿刺碳纤维立体织物
钢针阵列布放装置结构方案 整体穿刺加压密实机构结构方案 2.碳纤维多层角联机织装备及技术研发 碳纤维多层角联织物织造工艺过程中涉及三个纱线系统之间的相互作用,特别是经纱为多层排列,织造过程中,开口、引纬、打纬、送经、卷取等各个运动具有新的特点和规律,他们之间既独立,又关联,并与机器主轴的转动角度和速度有严格的时空关系。系统研究各个运动之间的相互关系,建立基于主轴的控制模型,解决各个运动机构和机器主轴的协调和同步运行。
T型实物 工字型实物
碳纤维多层角联织机装备实物照片 3.基于云平台的新一代智能细纱机研制 我校与山西鸿基科技有限公司基于“纺织装备云平台”采用协同设计方法联合研制的基于云平台的新一代智能细纱机SXF1599A,创新点如下: a.将从粗纱喂入到管纱卷绕整个纺纱纱路分为喂入、牵伸、加捻、卷绕成形等八个张力区,通过分析与优化各个区的张力变化,得到最佳纺纱纱路。 b.在纺纱断面优化设计的基础上,结合各部件的传动设计、整节装配等设计细纱机机架,采用钢墙板、园机梁(型材)、L形龙筋等进行相互连接。 c.锭子采用节能滚盘传动;牵伸采用电子牵伸,无油干式车头,可通过人机对话改变工艺,保证了电子传动系统的精确稳定。 d.集体落纱采用人字臂升降、气架抓管、凸盘采用摩擦带驱动、取消中间位,落纱时间控制3min内。 4.棉纺机械成套设备造型设计 棉纺成套设备造型设计包括对产品整体造型的优化再设计。主要针对产品的文化语义、钣金外壳的造型与结构、钣金外壳的色彩搭配,按照中国纺织机械(集团)有限公司外观设计标准执行的LOGO、字体、外观五金件、通风孔、过滤网、警示标示、操作面板、铭牌进行设计。
并条机络筒机
细纱机参展实物图 研究方向之三:工业机器人系统及智能化
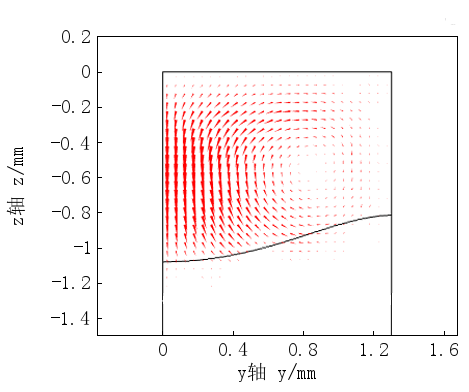
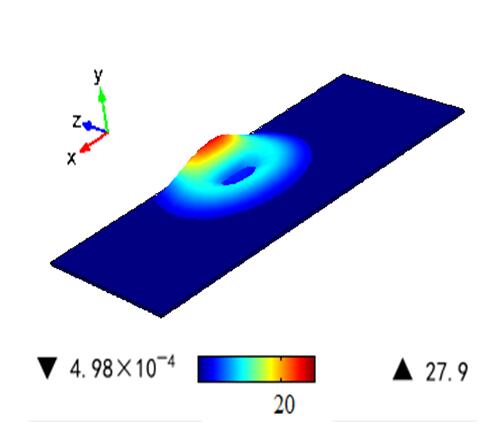
1.外加电磁力的航空发动机叶片等离子焊接修复精确成形控制方法研究 研究了叶片宽度沿修复路径逐渐减小,熔池表面张力、电弧力及重力的变化规律,并分析这些力对叶片成形精度的影响。仿真结果表明,在流体流动的驱动力中,表面张力是熔池中流体流动的主要驱动力,又因为焊接电流较小,电磁力影响稍小于浮力。表面张力、电磁力、浮力等各个因素单独作用时熔池内液态金属的流动行为。
(a) 表面张力 (b) 电磁力 不同作用力下熔池内流场分布状态
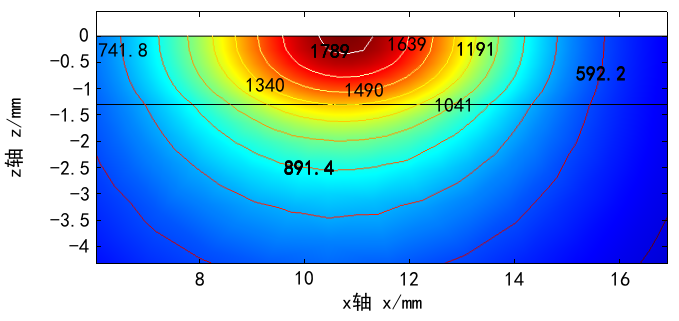
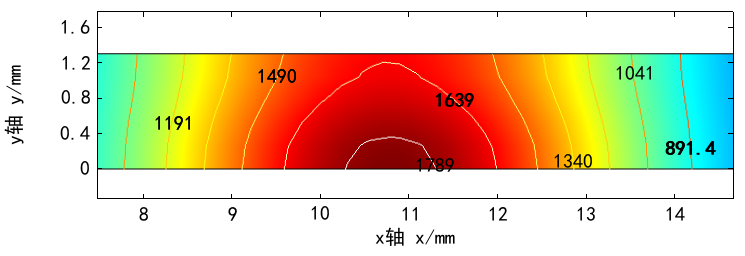
(a) 纵截面 (b) 表面 各截面温度场分布
工件表面各物理场分布图 实验设备硬件系统图
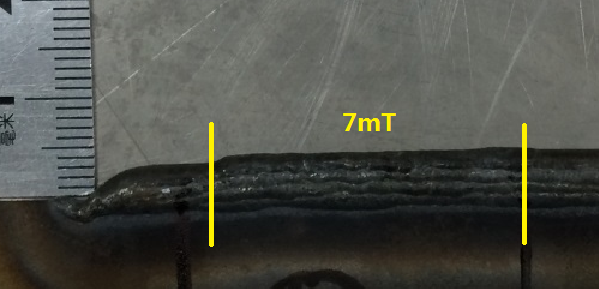
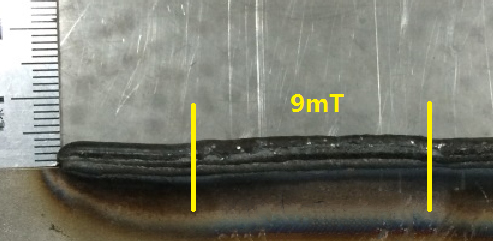
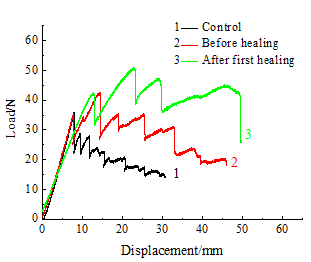
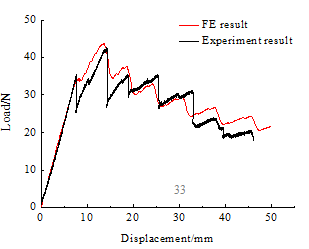
(a)7mT (b)9mT 不同磁感应强度下堆焊层形貌 2.基于内联三维自修复网络的热固性复合材料制备与自修复机理及其力学性能研究 用直径为1.5mm的EMAA修复剂纤维将铺层顺序为[90°/0°]3S的预浸料沿厚度方向进行缝合及平面方向进行编入,建立内联三维自修复网络,制备出自修复网络复合材料。
万能试验机双悬臂梁实验结果 修复前载荷-开口位移实验与仿真曲线
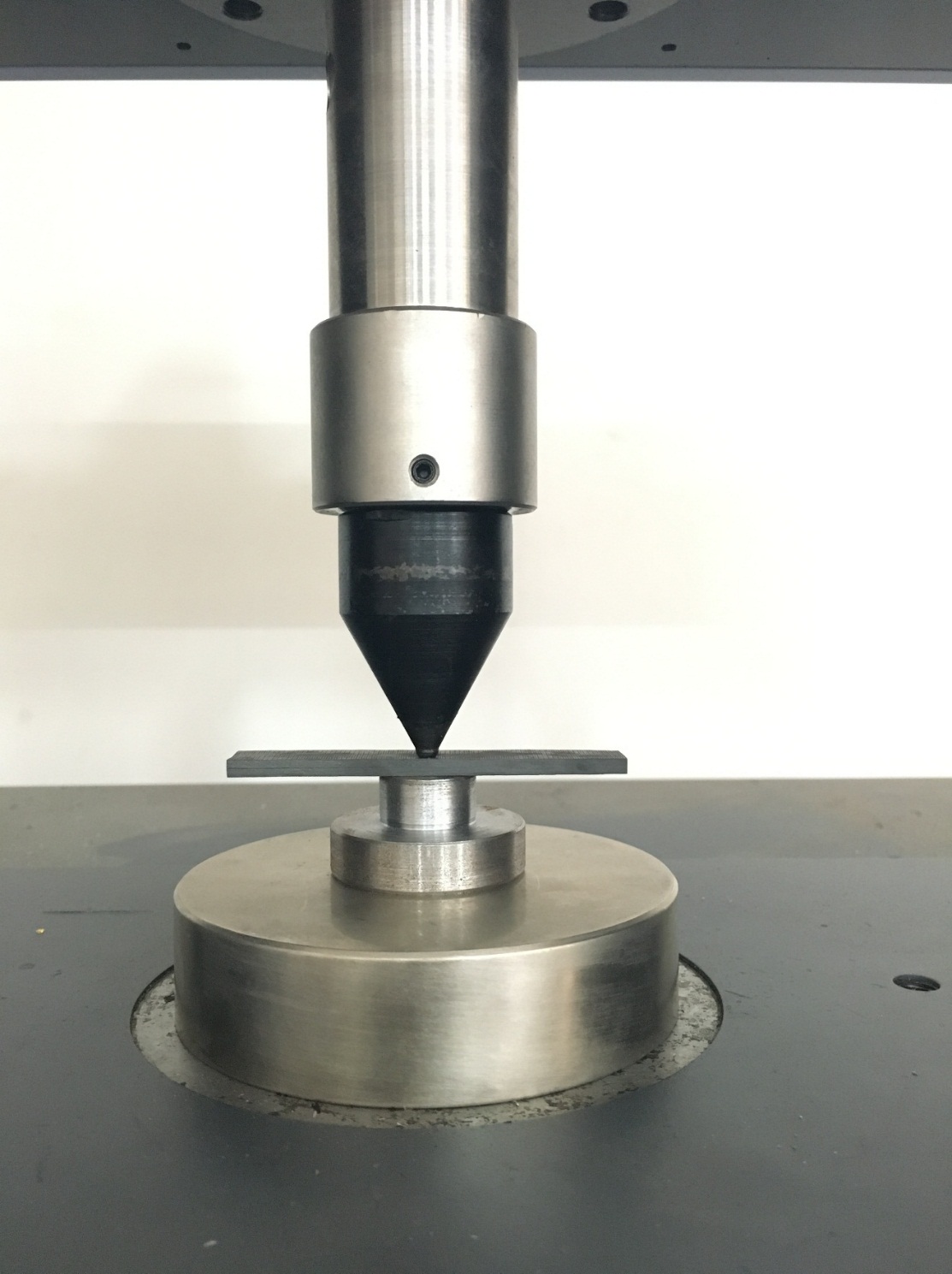
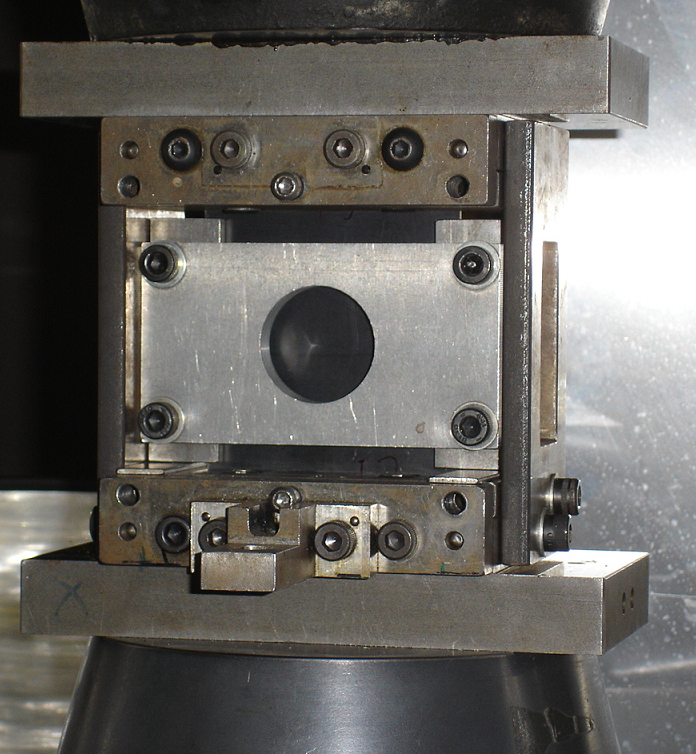
(a) (b) 准静态压痕实验
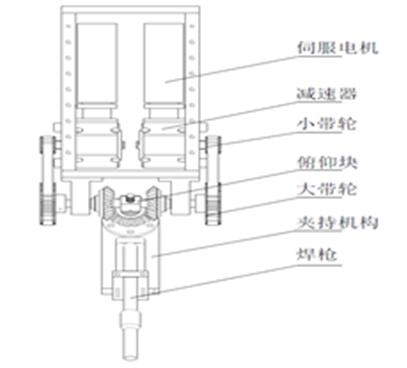
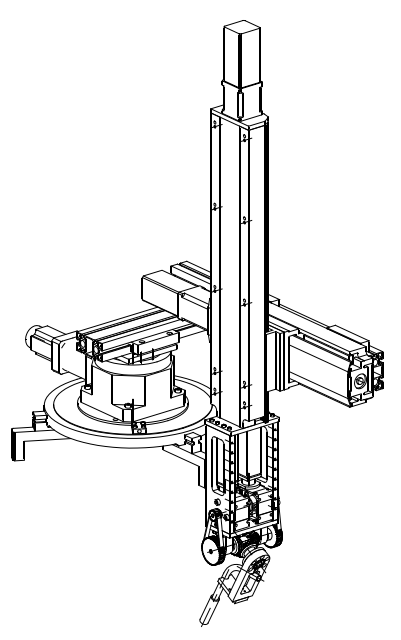
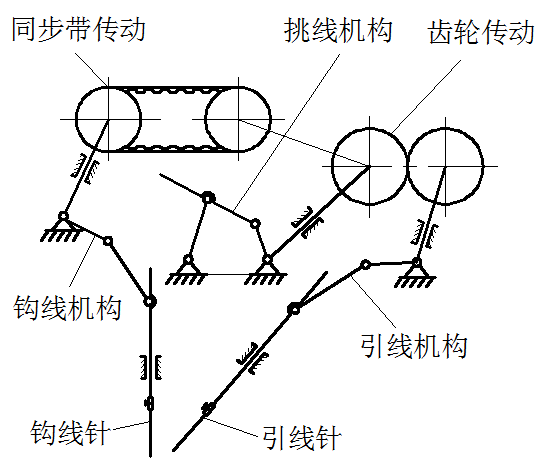
自修复复合材料样件实验 3.K/Y型导管架焊接机器人 机器人焊接执行机构设计:为了使机器人焊接时,避免焊接执行机构从管管斜交相贯狭小空间处通过时与焊接构件本身的碰撞,需要从结构上减小焊接执行机构的包络体积。利用差动轮系原理,通过同步带传动,在保证小体积的前提下实现两个自由度的运动。
(a)手腕结构 (b) 手腕样机 机器人腕部结构
(a) 整机模型 (b) 实验样机 机器人样机
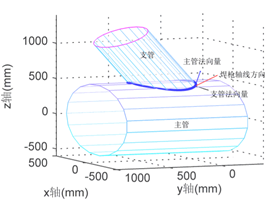
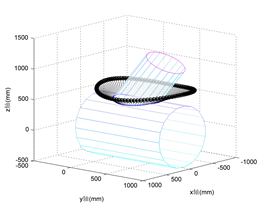
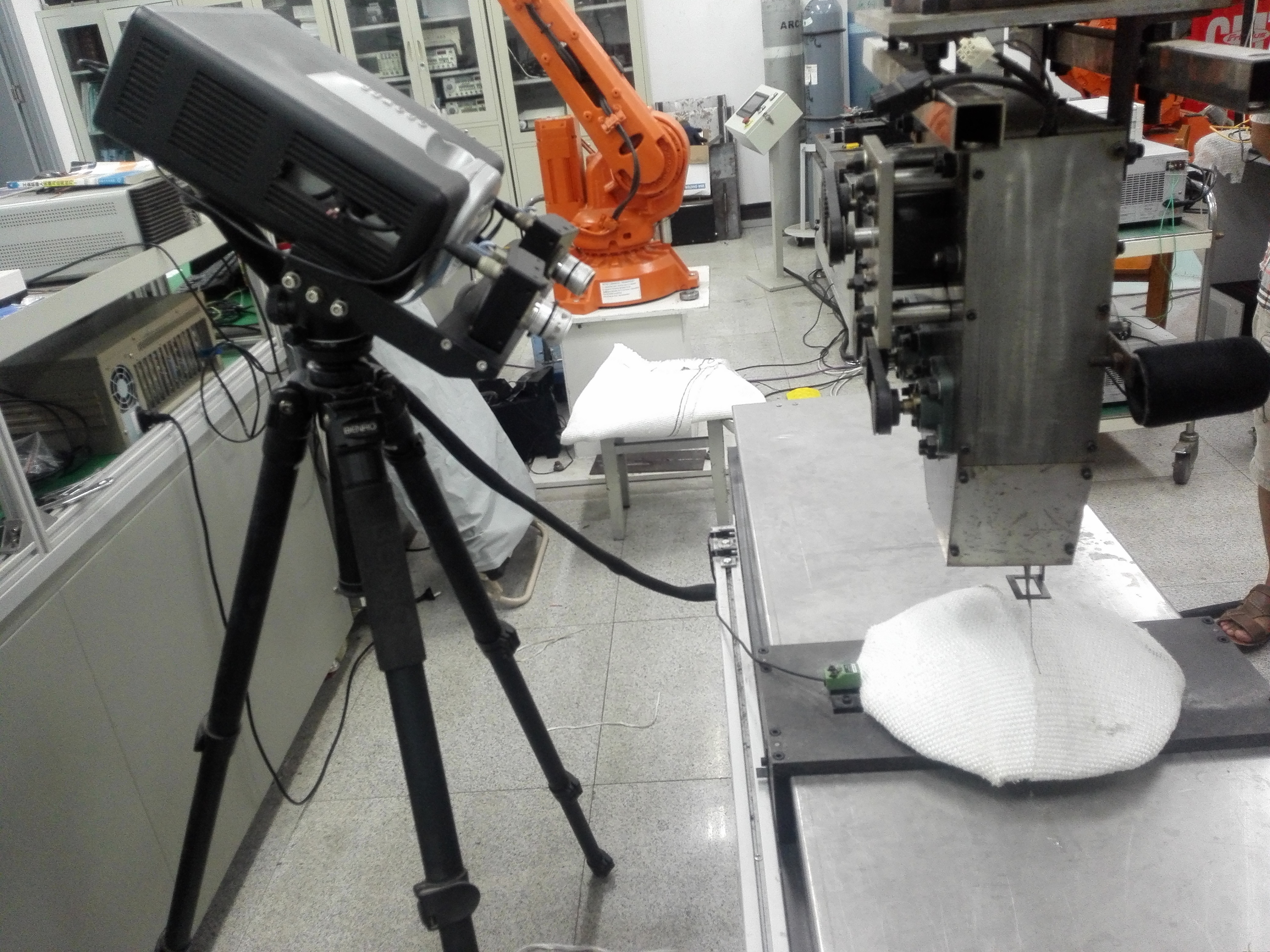
(a) 单点位置焊枪位姿 (b) 焊枪轨迹规划 机器人轨迹规划 4.三维纺织复合材料构件机器人缝合系统关键技术研究 结合结构光视觉跟踪传感技术,研制三维复合材料预制结构件缝合机器人视觉跟踪系统,就视频采集、信号传递的软硬件系统及图像处理的算法进行研究和设计。
缝合机器人视觉跟踪系统 摄像机获得的织物图片
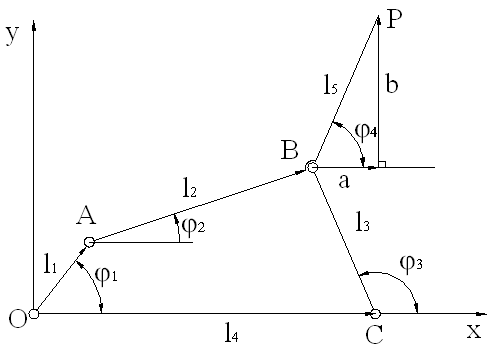
缝合机构简图 挑线机构矢量多边形
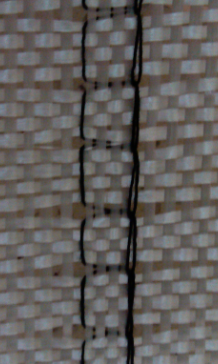
缝合结果 缝合效果图 研究方向之四:精密加工技术及质量控制
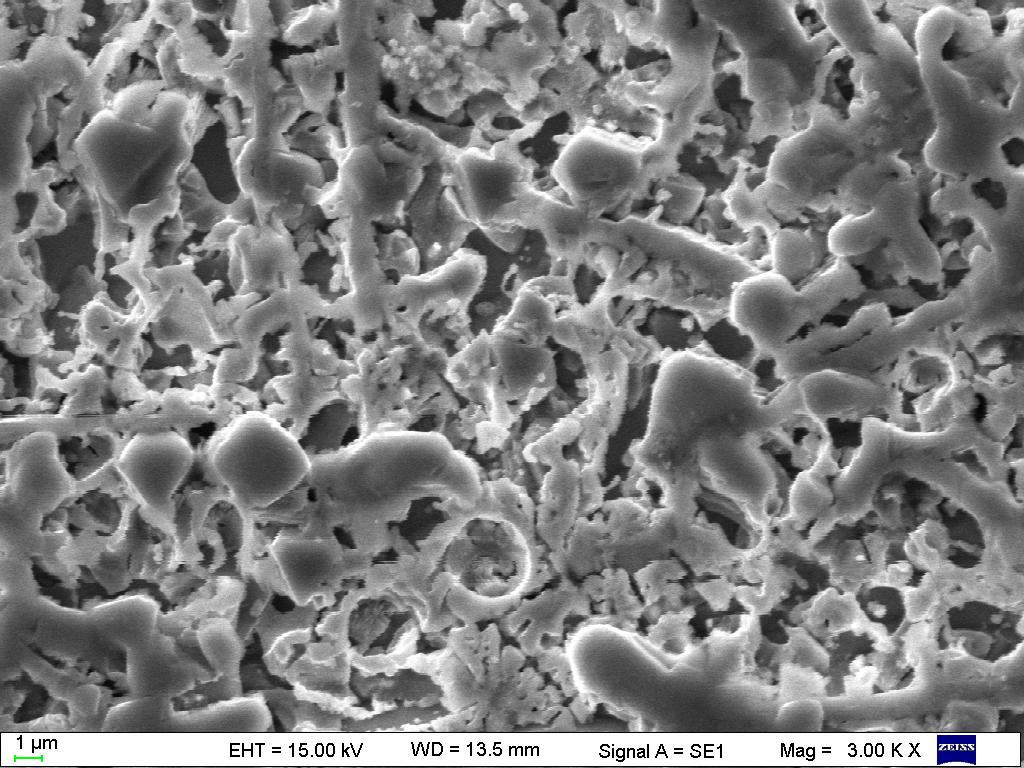
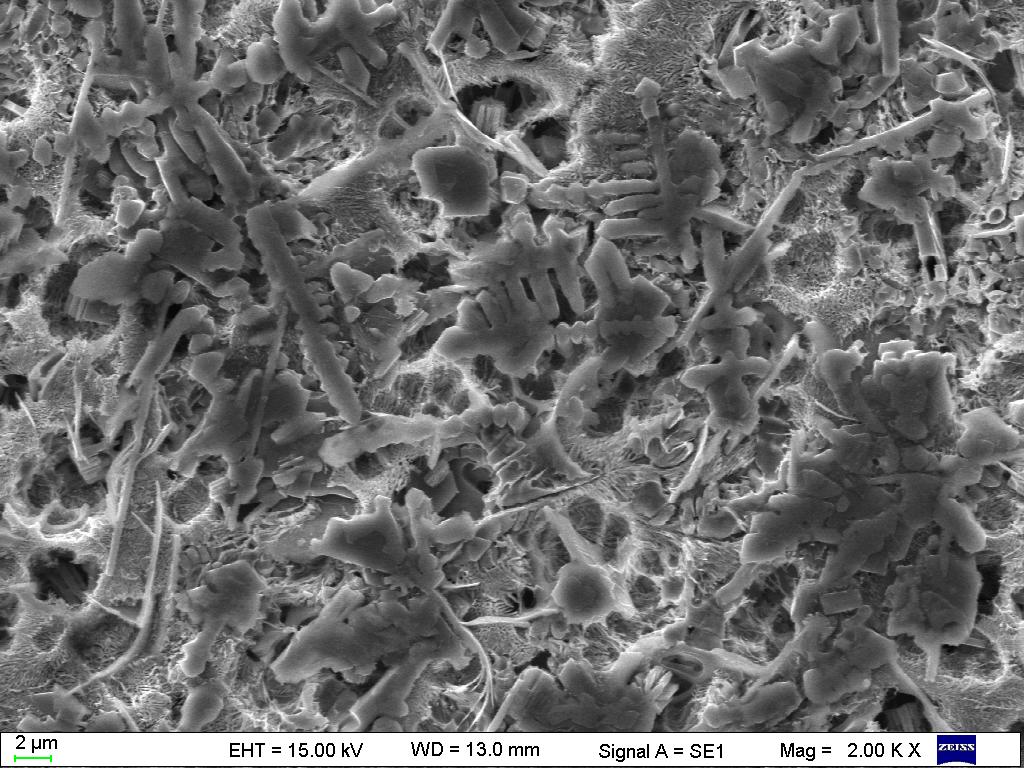
1.钛合金激光熔覆耐磨-自润滑涂层及其抗原子氧侵蚀性能 在钛合金表面获得耐磨-自润滑涂层,选用NiCrBSi自熔性合金粉末(具体牌号Ni60)+Ni/MoS2(Ni包MoS2)机械混合粉末作熔覆材料,通过激光熔覆过程中Cr与S元素、以及C与Ti(来源于基材TC4合金)元素之间的化学反应,获得了以TiC为强化相,CrxSy为润滑相的Ni基复合涂层。
(a)20%Ni/MoS2 (b)40%Ni/MoS2 Ni/MoS2含量对熔覆层微观组织结构的影响
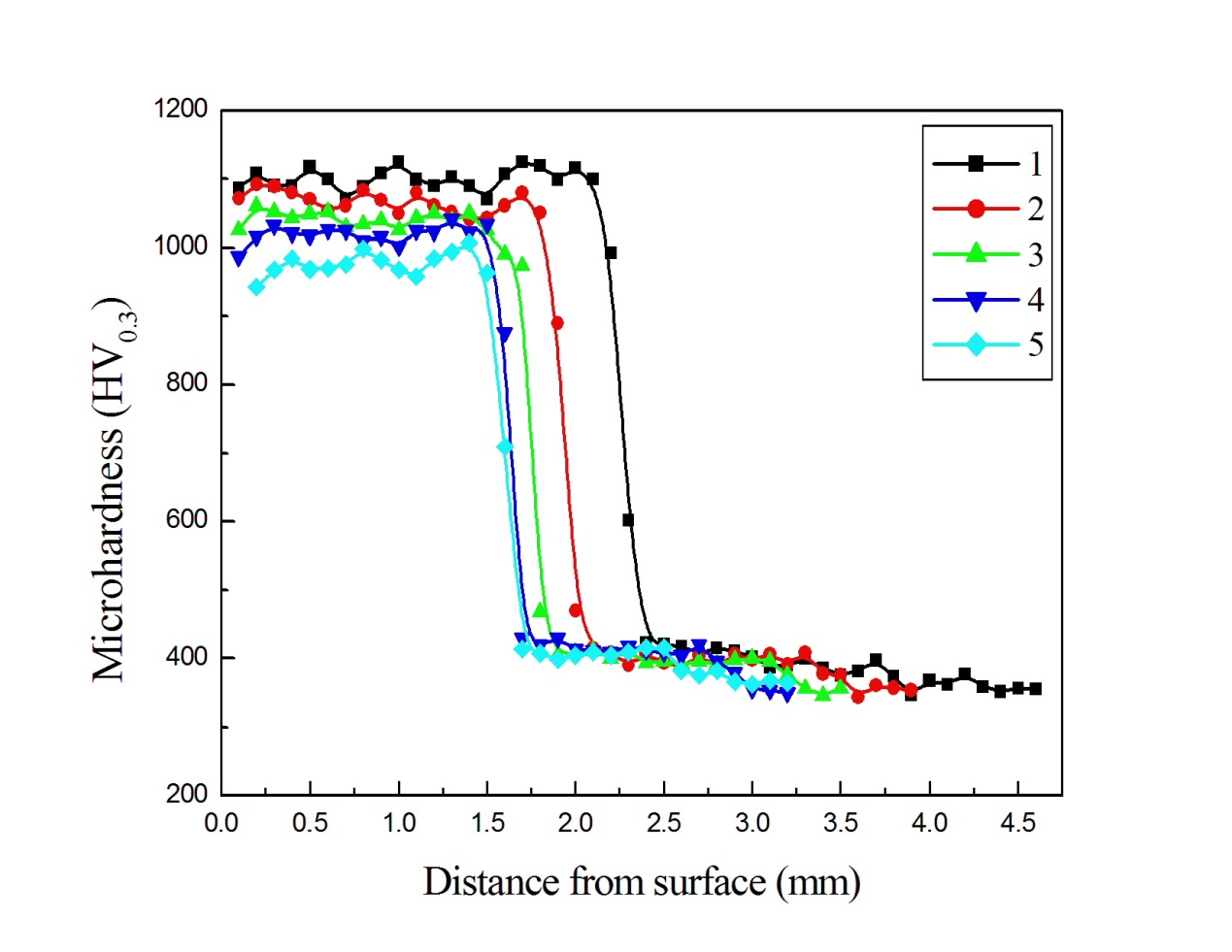
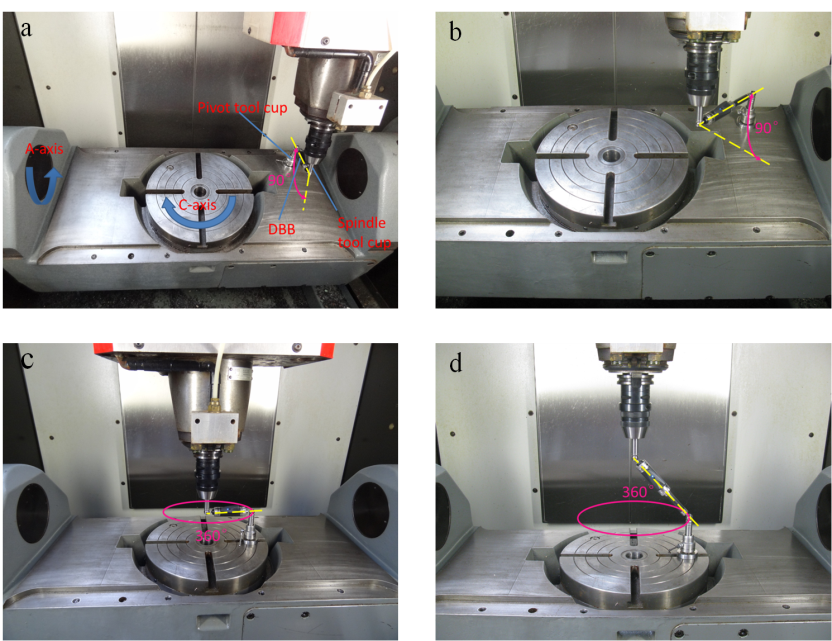
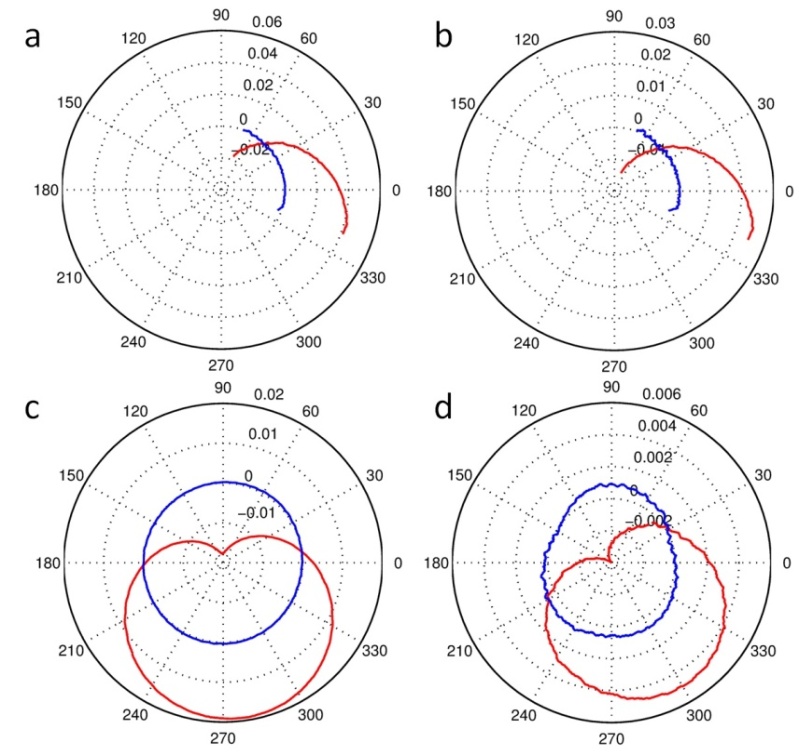
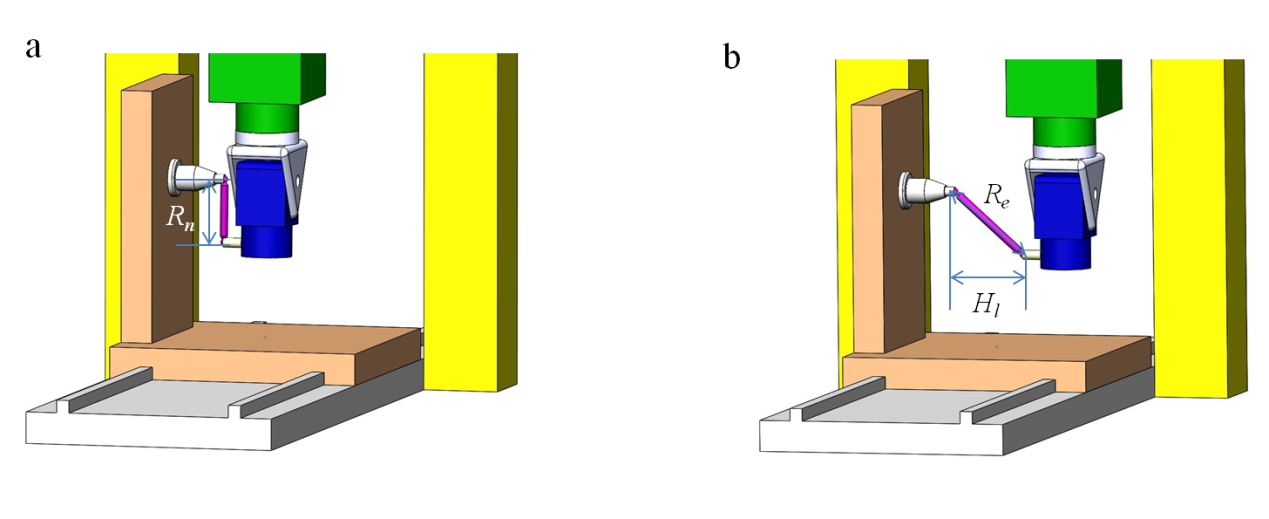
扫描速度对熔覆层显微硬度的影响 涂层在不同环境中摩擦系数曲线 2.数控机床精度检测与控制 建立一种基于球杆仪系统的回转轴几何误差辨识方法,利用球杆仪及球杆仪加长杆分别对摇篮式五轴数控机床的两个回转轴进行了单独测量,有效剔除了线性轴误差对实验结果的影响。此外,建立XC、YC、ZA三种一线性轴一回转轴的组合运动轨迹,基于齐次坐标变换理论模拟了上述三种运动组合的球杆仪几何误差特征化结果,得到了不同几何误差导致的球杆仪检测结果独特几何形状特征。
五轴机床单回转轴几何精度测量方法
单回转轴几何精度检测及补偿结果
同拓扑结构五轴机床球杆仪检测方法 3.航空关键结构件精密加工表面形貌在线监测理论与方法研究 在国家科技重大专项《基于长服役寿命的航空发动机典型难加工材料零件高性能切削技术》(编号:2014ZX04012014)和国家自然科学基金项目《基于声发射的镍基合金铣削表面缺陷在线监测理论与方法》(编号:51175371)的资助下,以精铣加工工艺和航空航天制造中广泛应用的铝合金Al7075-T6为研究对象,在借鉴和吸收国内外先进研究成果的基础上,对铣削加工及典型过程特征(表面形貌、表面偏差和颤振)机理进行了深入研究,创新的提出了基于多传感器信息对加工过程中的动态影响因素(刀具变形、刀具振动)进行实时表征和建模的思想,以此为基础建立了系统的精铣表面形貌建模及在线监测的理论和方法。
瞬时切削厚度模型 瞬时切厚权重分布
考虑刀具变形和刀具振动的仿真表面形貌
主轴-刀具系统频响函数分析 颤振稳定性预测结果分析
基于频域搜索的颤振频率在线辨识 基于频域能量比的颤振严重性辨识
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


















地址:电话:Email:
制作维护